جلسه دفاع پایان نامه: دانیال جعفری قره داغی، گروه مهندسی ساخت و تولید
خلاصه خبر:
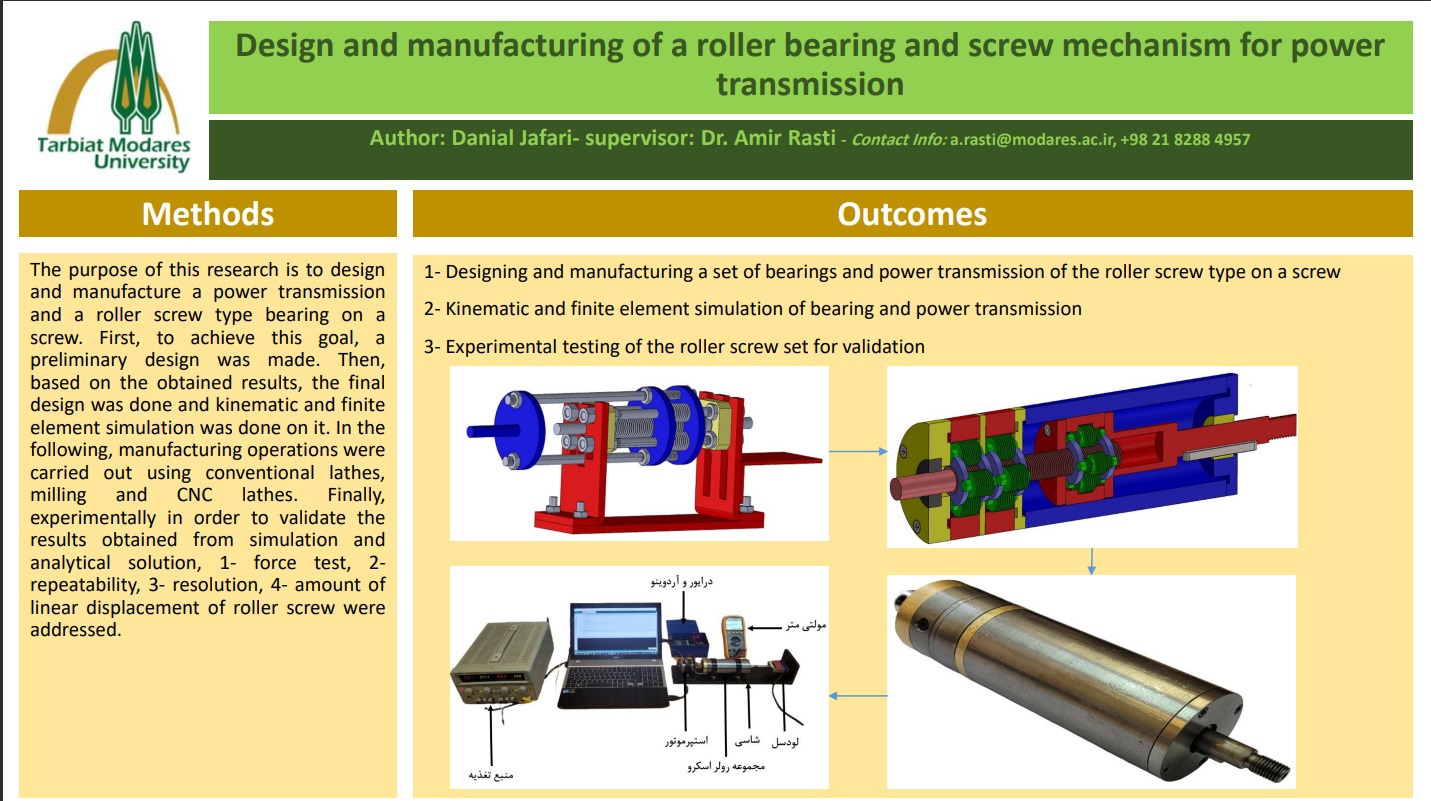
عنوان پایان نامه: طراحی و ساخت مجموعه یاتاقان و مکانیزم انتقال قدرت رولر اسکرو
ارائهکننده: دانیال جعفری قره داغی استاد راهنما: دکتر امیر راستی داور داخلی: دکتر یوسف حجت داور خارجی: دکتر علی یزدیان ورجانی تاریخ: 1403/03/19 ساعت: 17 مکان: کلاس 154
چکیده: رولر اسکرو وسیلهای است که حرکت چرخشی را به حرکت خطی تبدیل میکند. ازآنجاییکه لغزش بین پیچومهره بر دقت حرکت تأثیر میگذارد، رولر اسکرو با تبدیل لغزش به غلتش دقت حرکت را افزایش میدهد. رولر اسکرو عملکردی مشابه با بال اسکرو دارد، با این تفاوت که بهجای ساچمه از غلتک استفاده میشود. بدین ترتیب تماس نقطهای ساچمهها تبدیل به تماس خطی غلتکها میشود و عمر مفید را تا 10 برابر افزایش میدهد. مقدار حرکت خطی بهازای دور پیچ برابر است با گام آن، که یک رولر اسکرو میتواند طیف گستردهای از مقدار حرکت خطی به ازای یک دور را ارائه دهد که در این پژوهش هدف رسیدن به جابجایی بسیار کمی به ازای یک دور پیچ است. مزایای اصلی رولر اسکرو عبارتند از: 1- تحمل بارمحوری و شعاعی بالا، 2- دقت و سرعت بالا، 3- حرکت خطی متنوع به ازای یک دور پیچ. در این پژوهش، مکانیزم یاتاقان و انتقال قدرت از نوع رولر اسکرو به صورت همزمان بر روی یک پیچ اعمال گردید تا هردو در ابعاد یکسان توانایی تحمل بار محوری و شعاعی بالا را داشته باشند. بدین جهت مدل اولیه ای برای یاتاقان و انتقال قدرت از نوع رولر اسکرو طراحی و ساخته شد. مشاهده گردید که در مکانیزم انتقال قدرت اگر با قطع کردن چرخش غلتکها حرکت خطی صورت گیرد، برای چرخاندن پیچ گشتاور بالایی نیاز است و چرخاندن با گشتاور بالا باعث تخریب غلتکها تحت اصطکاک بالا میشود. با آزمایش طرح اولیه یاتاقان مشخص شد، اگر قطر و گام غلتک-پیچ یکسان و از طرفی دیگر جهت رزوه آنها عکس هم باشد، با چرخش پیچ و غلتک با درگیر بودن دایره گام آنها، غلتش ایجاد و حرکت خطی صفر میشود. در ادامه، دو طرح برای یاتاقان و یک طرح برای انتقال قدرت انتخاب شد. یاتاقان طرح یک، قطعات اصلی مجزا و یاتاقان طرح دو، قطعات به صورت یک تیکه طراحی شدند. بعد از ایجاد مدل نهایی، شبیهسازی سینماتیکی و المان محدود بر یاتاقان و انتقال قدرت صورت گرفت. در بخش شبیهسازی سینماتیکی، انتقال قدرت در سه سایز مختلف و یاتاقان در یک سایز مورد بررسی قرار گرفت که با اعمال بارمحوری متعدد، حرکت خطی مهره به ازای یک دور پیچ، سرعت خطی مهره، سرعت زاویهای غلتک و سرعت زاویهای نگهدارنده غلتکها بدست آمد. ملاحظه شد در مکانیزم انتقال قدرت نتایج حاصل از شبیهسازی سینماتیکی با حل تحلیلی یکسان است، امّا با افزایش بارمحوری، سرعت خطی مهره و سرعت زاویهای غلتک در گامهای اولیه به دلیل فشردگی بین رزوهها با حداکثر 5/4درصد کاهشیافته است. با شبیه سازی یاتاقان مشاهده شد که غلتکها و نگهدارنده غلتکها با سرعت زاویه ای یکسان و بدون حرکت خطی حول پیچ میچرخیدند. در بخش شبیهسازی المان محدود، جهت تحلیل حداکثر تحمل بار محوری مجموعه رولر اسکرو، توزیع تنش و کرنش بین پیچ، غلتک و مهره یاتاقان و انتقال قدرت بررسی گردید. مشاهده شد یاتاقان رولر اسکرو توانایی تحمل بارمحوری هشت کیلونیوتن و انتقال قدرت، توانایی تحمل بارمحوری هفت کیلونیوتن را دارد. درنهایت با آزمایشهای تجربی جهت اعتبارسنجی، نمودارهای گشتاور-نیرو، گشتاور-سرعت دورانی، تکرارپذیری، رزولوشن بدست آمد.